CIRCUITOS DE LAVADO
Hoy en día las comodidades en un vehículo buscando el confort
de quien lo utiliza ha llegado a ciertos niveles que hace 20 años ni se
imaginaban que algún día fueran posibles, entre estos elementos de confort y
aun mas de seguridad en la vía se integran limpia parabrisas para mejorar la
visibilidad en condiciones de lluvia pasando por lloviznas leves con una
función de intermitencia y llegando a una de gran velocidad para lluvia fuerte.
De aquí los conceptos de funcionamiento de dichos elementos y componentes que
lo conforman los cuales explicaremos a continuación.
1. Elementos
de los circuitos de limpieza y lavado.
Estos
elementos son básicamente motores, conmutadores y relés temporizadores, pero en
algunos casos se utilizan los convencionales.
Estos
circuitos por lo general contienen elementos diseñados especialmente con este
fin.
1.1.
Conmutadores.
Los elementos de mando de
los limpiabrisas siempre son accionados mediante conmutadores con funciones específicas
para hacer parada del elemento que limpia en el momento indicado esta función
se llama freno eléctrico o también la intermitencia. También controlan las
bombas de lavado
1.2.
Motores
de limpiaparabrisas.
Son por lo general de imán
permanente y aun función a demás de
proporcionar el movimiento es convertir el movimiento rotatorio en movimiento
oscilante, la manera de reducción de velocidad se obtiene por medio de tornillo
sin fin y una gran rueda dentada en relación con el tornillo sin fin.
Estos motores tienen una
larga vida útil y libre de mantenimiento.
Tienen una gran carga al
arrastrar las escobillas de goma tanto en seco como con humedad acarreando gran coeficiente de rozamiento por
lo cual deben ser muy potentes.
1.2.1.
Traen
como mínimo dos velocidades de trabajo:
·
Velocidad
lenta de 45 barridos por minuto.
·
Velocidad
rápida de 65 barridos por min.
1.2.2.
Debe
estar equipados con un sistema de realimentación que asegure que la parada de
escobillas, independientemente del momento en el que el conductor efectúe la
maniobra de paro, sea siempre la misma, para que no afecte la visibilidad del
conductor.
Para conseguir dos
velocidades se utiliza el sistema de tercera escobilla, en otras palabras es
disponer una escobilla adicional pero en este caso esta escobilla le reducirá
el rendimiento al motor y lo hará mas lento.
En el caso de que el
limpiaparabrisas se le quite la alimentación o se apague antes de terminar la
carreta de barrido cuenta con una realimentación que permitirá que termine el
barrido y a su vez un freno eléctrico garantice que pare bruscamente en el
momento indicado.
1.3.
Relés
y temporizadores.
Se utilizan en la aplicación
de intermitencia o intervalos determinados de funcionamiento.
2.
Fases
de trabajo de los motores de limpiabrisas.
El
motor para estas funciones debe ser un motor de fácil manejo que se le pueda
aplicar las necesidades como realimentar y frenar para conseguir una posición
correcta.
Para
comprender mejor se aclarar algunos conceptos.
·
Alimentación
normal: en el primer esquema se observa
un motor funcionando de forma normal, ya que se ha accionado el conmutador de
mando y le llega tención a la escobilla positiva. Los contactos auxiliares de
de la realimentación permanecen pasivos.
·
Realimentación:
en el segundo esquema, se observa que el conmutador está situado en posición de
parada, y no suministra tensión desde el terminal 15. Sin embargo, el motor sigue girando ya que la
tensión llega por los terminales 53a y 53e. el motor seguirá alimentado y
girando hasta que la leva separe los contactos.
·
Posición
de freno eléctrico: para conseguir un frenado brusco del motor y evitar que la
inercia del giro del motor haga enganchar de nuevo la realimentación con lo que
el motor no se pararía, basta con cortocircuitar las escobillas en el momento
que cesa la alimentación. La energía
debido a la inercia del inducido se transformara en calor que al querer
funcionar el motor como generador.
3. Conexiones
básicas según tipos de conmutadores
3.1.
Conexionado
tipo 1.
Es el más común utilizado en
la actualidad ya que utiliza el conmutador más simple. La alimentación para la velocidad lenta se hace a través del
terminal 53 y la rápida del terminal 53b.
3.2.
Conexionado
tipo 2.
Circuito utilizado por femsa
ahora Bosch por medio de un conmutador de 3 polos con un terminal mas (5) para
la misma conexión que en el montaje 1.
4.
Mando temporizado del limpiaparabrisas.
La
velocidad de barrido del motor es de unos 45 c/min y puede ser excesiva para
una leve llovizna acarreando con ello un esfuerzo excesivo por demasiada
fricción lo que ocasión a un desgaste prematuro del motor, esto se puede evitar
adicionando un relé intermitente.
4.1.
Circuito
temporizado básico
Un circuito de limpiabrisas
de dos velocidades con función intermitente precisa de un relé temporizador de
4 terminales, des que aseguran la alimentación, positivo y negativo, un tercero
que recibe la señal y el cuarto que ejecuta la maniobra.
4.2.
Limpiabrisas
temporizado con bomba de agua.
Los motores de con
velocidades en este momento son poco usados ya sea en carros antiguos o en
versiones muy básicas, en este momento se usan motores de varias velocidades,
con intermitencia e incorporan un sistema de lavado el cual para hacer efectiva
la limpieza hace tres barridos del cristal mientras se aplica un chorro de
agua.
5.
Limpia luneta trasero.
La
limpia luneta posterior nace de la necesidad de mantener la visibilidad hacia
atrás de pequeños vehículos que por su diseño corto alcanzan a salpicar la
parte trasera del vehículo.
Este
equipamiento adicional en algunos vehículos puede estar compuesto de barridos
intermitentes o acompañado de lavado los cuales también se conectan a relés
para hacer mandos de baja potencia.
6. Ejemplos
prácticos de circuitos.
Circuitos
elevalunas eléctricos
7.1 Elementos
de los circuitos elevalunas
Sistemas
mecánicos de accionamiento: para subir y bajar los
cristales, el movimiento rotativo del motor debe convertirse en movimiento
rectilíneo en el cristal. Se puede clasificar en mecanismos de cable y
mecanismos articulados, la tendencia
entre los fabricantes es a utilizar los de arrastre por cable, de menor coste
de fabricación.
En la figura 7.1
muestra dos sistemas de accionamiento, a la izquierda accionamiento con cable
de tracción, el motor arrastra el cable que mueve el cristal por medio de
poleas, a la derecha se observa el accionamiento del cristal por mecanismo
dentado articulado.
MOTORES: se utilizan de forma universal motores eléctricos de imanes
permanentes, adecuados para el limitado espacio; debido a que la velocidad de
giro y el par motor son diferentes, es
necesario el empleo de reducciones.
Una
característica de seguridad importante de los alza cristales es que su manejo
debe ser suave desde el interior pero inviables desde el exterior,
característica que recibe el nombre de funcionamiento irreversible. Este
funcionamiento se consigue normalmente
en el elemento des multiplicador.
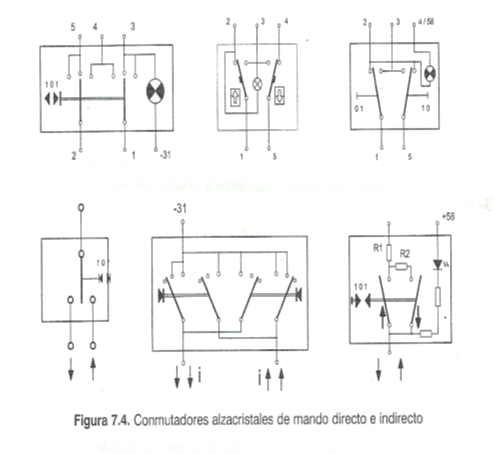
CONMUTADORES
Y ELEMENTOS DE MANDO: los conmutadores de mando de
los elevalunas son de conexionado interno específico para tal función. Son
pulsadores basculantes, generalmente con el ideograma dibujado, para un fácil
reconocimiento, si es válido ordenarlos según la potencia que puedan soportar,
se pueden clasificar como conmutadores de mando directo que se alimentan
directamente del motor del mecanismo y conmutadores de señal o mando indirecto
que transmiten una señal a una caja electrónica. En la figura 7.4 superior se
muestran conmutadores de mando directo, y los de mando indirecto en la parte
inferior los cuales se caracterizan por su relación necesaria con otros
circuitos.
SISTEMAS DE
PROTECCION DE LOS MOTORES: aparte de los habituales
fusibles de protección de los circuitos, los motores para elevalunas deben de
ir equipados con fusibles térmicos de desconexión y rearme automático. Estos
fusibles no tienen un número limitado de maniobras durante su vida útil, sino
que su función es prevenir el anormal funcionamiento del mecanismo
temporalmente. Cuando se fatiga el fusible térmico y que da abierto el motor no
funciona y presenta falta de continuidad entre sus escobillas. La detección
final de carrera se capta básicamente mediante dos conceptos:
a.
Por un circuito divisor de
tensión que capta el aumento de consumo del motor
b.
Por variación de frecuencia de
la señal generada en las escobillas (noise detector)
ELECTRONICA DE MANDO: la incorporación
electrónica responde a las necesidades actuales de los vehículos, donde los
circuitos deben realizar cada vez más funciones más elaboradas, que suponen
mayor confort para el conductor y acompañante.
Según
la disposición del montaje del componente electrónico en el
circuito elevalunas, se encuentran tres montajes diferentes:
a.
Electrónica independiente:
montaje clásico, el relé se encuentra separado estructuralmente por el motor y
del conmutador, montado en la caja de relés o en la propia puerta, esta
solución presenta un aumento de cableado.
b.
Electrónica integrada en el
motor: el motor y la unidad electrónica forma un solo conjunto inseparable, disminuye cableado y facilita la
interconectividad.
c.
Electrónica integrada en el
conmutador: es común que el relé y el conmutador electrónico formen una unidad
no desmontable.
7.2 Maniobras
en los circuitos elevalunas:
CIRCUITO BASICO: El
alza cristales eta conformado por un conmutador inverso y un motor de corriente
continua de imanes permanentes, con el apropiado mecanismo de arrastre.
a.
a la izquierda, el motor está parado, pues no recibe tensión debido a
la posición central del conmutador sin accionar.
b.
En el centro, el conmutador
esta accionado a la izquierda y el motor gira en sentido horario.
c.
En la derecha el motor gira en
sentido contrario , entra por B y sale por A
MONTAJES PRACTICOS: las
diferencias significativas son de diseño exterior que eléctricas, sin embargo,
se utilizan distintas formas para la iluminación o localización del conmutador
que pueden inducir a cierta confusión, ya que esto percute en el número de
terminales del conmutador.
a.
Conmutador con 4 terminales
para invertir el giro, es sencillo y utilizado en vehículos antiguos.
b.
Conmutador con 5 terminales, es
de los más utilizados. Puede ser alimentado en su terminal central positivo o
negativo.
c.
Conmutador con 5 terminales,
terminal central se conecta a negativo. Utilizado por Renault
d.
Conmutador con 5 terminales,
uno de ellos es para alimentar una lámpara interior, los otros cuatro son para
el motor.
CIRCUITOS DE MANDO CONMUTADO DIRECTO: el mando conmutado o desde dos puntos diferentes de un circuito
eléctrico es habitual en la industria y el las viviendas. En los automóviles,
en las ventanillas se ha impuesto en todos los modelos con elevalunas
eléctricos.
Fig. 7.10
a.
Motor en reposo, no funciona ya
que o llega tensión de los conmutadores.
b.
Conmutador del pasajero se ha
accionado hacia la izquierda, corriente desde el terminal 4.
c.
Conmutador del conductor se ha
accionado para conseguir el funcionamiento del motor hacia el sentido
contrario al anterior.
CONEXIONADOS DEL MANDO CONMUTADO: para mandar un motor reversible desde dos lugares diferentes hace
falta dos conmutadores inversores idénticos, conectados en serie, de tal manera
que la maniobra es segura y sin ningún peligro de corto circuito en los
instantes de movimiento simultaneo de los conmutadores.
CNSIDERACIONES SOBRE LOS CONMUTADORES DE MANDO
CONMUTADO: el mando conmutado desde dos puntos
diferentes no es posible con dos conmutadores de luz interior, en los que sean
operativos 4 terminales, pues el motor debería cerrar el circuito por la
lámpara, que quedaría en serie y su elevada resistencia impediría su
funcionamiento.
INCONVENIENTES DEL MANDO CONMUTADO DIRECTO: el principal inconveniente es el aumento de posibilidades de fallo
del circuito, ya que n cualquiera de las
maniobras de subir y bajar el cristal desde cualquier conmutador, la
corriente debe pasar siempre por los conmutadores en un doble camino de ida y vuelta.
CIRCUITOS ELEVALUNAS CON MANDO INDIRECTO: el componente electrónico debe estar alimentado, recibir la señal
de activación del sensor previsto y mandar el actuador de salida del circuito.
En este caso el conmutador genera la señal, la caja electrónica, integrada
al motor o separada del mismo interpreta
dicha señal y acciona el motor en el sentido deseado.
CIRCUITOS CON MANDO CONMUTADO INDIRECTO: el
mando conmutado en elevalunas con componentes electrónicos existen en diversa variantes, tienen una lógica que
difiere completamente de los de mando directo, el conmutador se encarga de
transmitir la señal de la acción deseada, y no de controlar el flujo y el
sentido de la corriente que pasa por el motor.
7.3 Mando por
impulsos.
Otra mejora que se introducido es el mando por
impulsos en los cuales el cristal sube y baja con una sola pulsación del mando,
sin necesidad de mantener este apretado. Este tipo de funcionamiento hace más
fáciles y seguras las acciones habituales de subir y bajar el cristal. También permite realizar la ventilación del
vehículos de forma mas rápida.
Todas estas ventajas, unidas a la necesidad de
introducir un componente electrónico en el circuito elevalunas para facilitar
su interacción con el cierre centralizado y alarma, junto con un bajo costo de
fabricación.
7.4 bloqueo de
los elevalunas posteriores.
El uso prolongado o maniobras seguidas bruscas de
subir y bajar el cristal puede deteriorar los contactos de los conmutadores de
mando o la parada del motor por desconexión del térmico de protección que
incorporan, la cual muchos fabricantes incorporan una tecla de bloqueo o
inhibición de dichos cristales.
El montaje lógico debe seguir permitiendo el control
de los elevalunas desde la botonera del conductor. E l bloque de los elevalunas
posteriores tiene sentido en el caso del que el mando se conmutado tanto para los sistemas de mando directo como para los que incorporan electrónica
para el control.
7.5 sistemas y
conceptos antipillado
La evolución de estos circuitos e los automóviles ha
llevado a incrementar la seguridad en los sistemas y el manejo de los mismos,
haciendo sistemas cada vez más seguros para los usuarios. Dentro del aspecto de
seguridad en el manejos de los elevalunas se han incorporado los llamados
sistema antipillado de ventanas, destinados a evitar aprisionamiento de partes
del cuerpo entre el cristal y la ventanilla.
Si el elevalunas incorpora la función antipillado, se
invierte el sentido de giro del motor al detectarse un aprisionamiento durante
el movimiento ascendente del cristal. El sistema antipillado necesita sensores
específicos, integrado en el propio mecanismo que controlan el número de
revoluciones del mecanismo durante el trabajo e invirtiendo el giro del motor
para liberar el cuerpo aprisionado. El
sistema debe der ser efectivo n la llamada zona de riesgo, comprendida en los
últimos 20 cm de carrera del cristal.
7.4 circuitos
prácticos de elevalunas
Se exponen en las figuras 7.18 y 7.19 ejemplos extraídos
de vehículos comerciales, que permitan apreciar que son circuitos que, aunque
de cableado extenso repiten maniobras similares. La figura 7.18 corresponde a
un modelo de cuatro puertas, de mando directo para las puertas traseras y del
pasajero. Aunque el cableado es extenso, el diseño del circuito es simple y
responde a los conceptos ya descritos anteriormente. En la figura 7.19 es
extraído de un vehículo del grupo General
Motors y es más moderno conceptualmente. Los motores van incorporados a
sendos relés electrónicos
Preguntas
1.
Si
un motor limpiabrisas no funciona al accionar el mando, podemos:
a)
Identificar
la escobilla positiva y alimentarla para verificar si funciona el motor.
b)
No
se puede probar el motor si no está desconectado por el cableado.
c)
se
puede comprobarla resistencia del inducido
2.
un
conmutador para un motor de limpia de una sola velocidad tiene:
a)
4
terminales
b)
3
terminales
c)
2
terminales
3.
Los
sistemas de realimentación y freno motor actuales son mayoritariamente:
a)
De
sector circular y escobillas rozantes
b)
De
leva
c)
Los
dos sistemas son usados con frecuencia
4.
El
movimiento alternativo de las escobillas del limpiabrisas se consigue:
a)
Con
un mecanismo de tornillo sin fin
b)
Del
conmutador en posición intermitente
c)
Con
un mecanismo (cuadrilátero articulado) fijado al chasis
5.
Durante
la marcha intermitente, el motor recibe corriente desde:
a)
La
propia realimentación del motor
b)
Del
conmutador en posición intermitente
c)
Del
relé temporizador
6.
Normalmente
cuando se acciona el mando de la bomba de agua del limpiabrisas:
a)
Solo
funciona el motor de la bomba
b)
Funciona
también el motor realizando las escobillas un ciclo de barrido
c)
Funciona
también el motor realizando las escobillas 3 o 4 ciclos de barrido
7.
El
relé que lleva unido el motor de limpia luneta trasera sirve para:
a)
Alimentar
el motor y proteger el conmutador
b)
Se
utiliza para conseguir de forma distinta la maniobra de freno eléctrico
c)
Se
utiliza como temporizador para mandar la bomba del limpia luneta trasero
8.
En
los esquemas eléctricos, los motores de limpiabrisas se representan con dos
escobillas positivas, de las cuales:
a)
La velocidad lenta corresponde a la escobilla
desplazada del eje de simetría
b)
La
velocidad rápida corresponde a la escobilla desplazada
c)
Cualquiera
de las dos puede ser la velocidad lenta o rápida
9.
Los
elevalunas actuales se accionan con mecanismos del tipo:
a.
Cable
y tornillos sin fin
b.
Engranajes
articulados
c.
Los
dos sistemas son empleado en la actualidad
10. Los motores elevalunas van protegidos con:
a.
Fusibles
de la potencia adecuada
b.
Utilizan
protección electrónica
c.
Térmicos
y electrónica combinada
11. Los
conmutadores inversores de elevalunas necesitan un mínimo de:
a.
4
terminales
b.
5
terminales
c.
6
terminales
12. En los elevalunas de accionamiento manual,
cuando falla uno de los conmutadores:
a.
El
motor solo realiza la maniobra en un sentido
b.
El
motor no funciona en ninguno de los dos sentidos
c.
El
motor funciona correctamente desde el conmutador en buen estado.
13. En los circuitos elevalunas conmutados, los
conmutadores se montan en paralelo:
a.
Cuando
no intervienen cajas electrónicas
b.
Solo
en la puerta del pasajero delantero
c.
Cuando
intervienen cajas electrónicas
14. El bloque de los elevalunas traseros es
necesario porque:
a.
Accionar
repetidamente el conmutador puede deteriorarlo
b.
El
motor se puede gastar si se loa hace trabajar de forma continua
c.
El
motor se puede quemar cuando se bloquea al final de la carrea del cristal
15. Para qué
es un sistema antipillado?
Para evitar aprisionamiento de partes del
cuerpo entre el cristal y la ventanilla.